K2 ROV Prosjekt
Vi bygger neste generasjons undervannsfarkoster for utforskning og konkurranser. K2 er modulært, kraftig og designet for robust feltbruk.
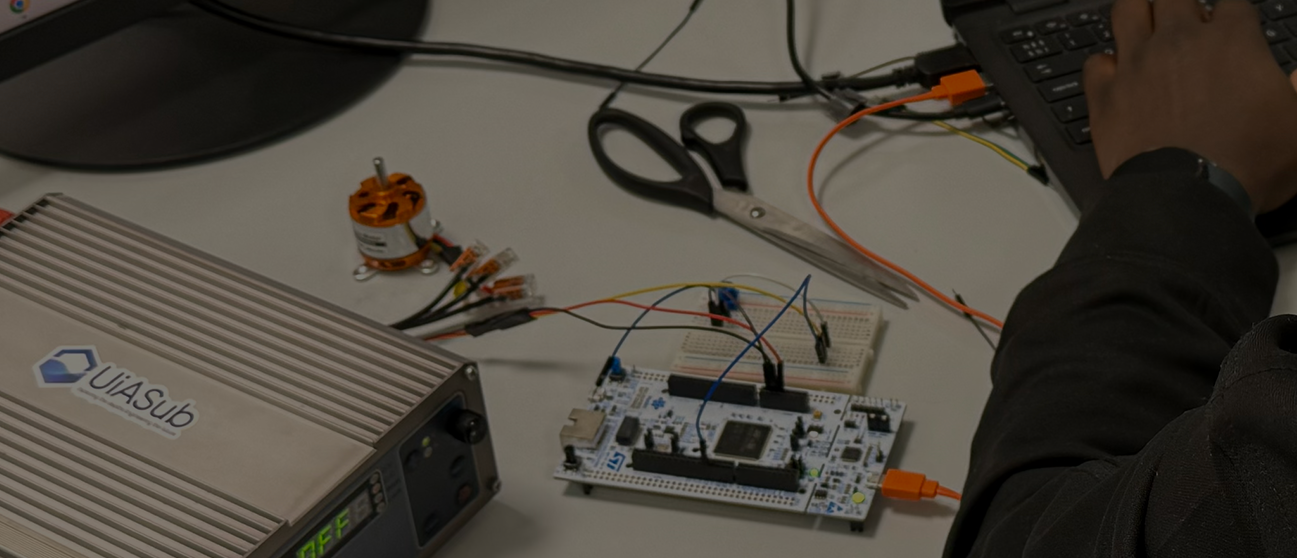
Vår ROV-utvikling har fokusert på praktisk ingeniørarbeid, samarbeid med næringslivet og open-source verktøy for kontroll og datainnsamling.
2+
År utvikling
2
ROV-er
~30
Teamstørrelse